Open Science Repository Mathematics
doi: 10.7392/Mathematics.70081944
Lyapunov’s Second Method for Estimating Region of Asymptotic Stability
Abstract
This seminar basically consists of three chapters. The first chapter converses the background about Lyapunov’s second method of estimating region of asymptotical stability (RAS) and mathematical preliminaries which will be needed in the next two chapters. The second chapter deals with Lyapunov’s second method for estimating region of asymptotic stability of autonomous nonlinear differential system. Chapter three deals with estimating region of asymptotic stability of nonautonomous system. Finally I summarize Lyapunov’s second method of estimating RAS.
Keywords: Lyapunov’s second method, asymptotic stability, autonomous nonlinear differential system, nonautonomous system.
Citation: Yadeta, Z. (2013). Lyapunov’s Second Method for Estimating Region of Asymptotic Stability. Open Science Repository Mathematics, Online(open-access), e70081944. doi:10.7392/Mathematics.70081944
Received: February 21, 2013
Published: March 20, 2013
Copyright: © 2013 Yadeta, Z . Creative Commons Attribution 3.0 Unported License.
Contact: [email protected]
1. Introduction
1.1 Background
The subject of this analysis is to estimate region of asymptotic stability using Lyapunov’s second method in differential equations (nonlinear dynamic system). This technique was discovered by Lyapunov’s in the 19th century. The technique is also called direct method because this method allows us to determine the stability and asymptotic stability of a system without explicitly integrating the nonlinear differential equation.
Lyapunov’s second method also determines the criteria for stability and asymptotical stability. In addition to giving us these criteria, it gives us the way of estimating region of asymptotic stability. Asymptotic stability is one of the stone areas of the qualitative theory of dynamical systems and is of fundamental importance in many applications of the theory in almost all fields where dynamical effects play a great role.
In the analysis of region of asymptotic stability properties of invariant objects, it is very often useful to employ what is now called Lyapunov’s second method. It is an important method to determine region of asymptotic stability. This method relies on the observation that asymptotic stability is very well linked to the existence of a Lyapunov’s function, that is, a proper, nonnegative function, vanishing only on an invariant region and decreasing along those trajectories of the system not evolving in the invariant region. Lyapunov proved that the existence of a Lyapunov’s function guarantees asymptotic stability and, for linear time-invariant systems, also showed the converse statement that asymptotic stability implies the existence of a Lyapunov’s function in the region of stability.
Converse theorems are interesting because they show the universality of Lyapunov’s second method. If an invariant object is asymptotically stable then there exists a Lyapunov’s function. Thus there is always the possibility that we may actually find it, though this may be hard.
When we mention Lyapunov’s second method to estimate region of stability, particularly for asymptotical stability, we have to know first the properties of asymptotical stability of
dynamic system at equilibrium point
1) x* = 0 is stable, and
2) x* = 0 is locally attractive; i.e., there exists
1.2 Objectives
The main objective of this seminar is to estimate region of asymptotical stability of nonlinear differential equation for both autonomous and nonautonomous systems using Lyapunov’s second method. This directly influences the exact estimating region of the asymptotic stability.
Hence this
seminar is deliberately to explore the following specific objectives:
• To
provide the methods for determining region of asymptotical stability (RAS)
• To
analyze and demonstrate region of asymptotic stability basically using
Lyapunov’s second method.
• To
analyze some related theorem, application and examples of region of
asymptotical stability.
1.3. Mathematical
preliminaries
In
this subtopic we deal with some mathematical results which will be needed later
and we state some general principles related to Lyapunov’s second method to
estimating region of asymptotic stability
1.3.1 Lyapunov’s
functions
Lyapunov’s
functions are a powerful function for determining the stability or instability
of fixed points of nonlinear autonomous systems. To explain the method, we
begin with a few definitions. We study an autonomous system
![]() (1.1)
(1.1)
We
assume that x and f(x) are in![]() .
The domain of f may be an open subset of
.
The domain of f may be an open subset of![]() ,
but we will only be interested in what happens near a particular point, so we
won't complicate the notation by explicitly describing the domain of f.
,
but we will only be interested in what happens near a particular point, so we
won't complicate the notation by explicitly describing the domain of f.
Let
V be a real valued function defined on an open subset U of ![]() and let p be a point in U.
We say that V is positive definite with respect to p (or just positive definite,
if p is understood) if
and let p be a point in U.
We say that V is positive definite with respect to p (or just positive definite,
if p is understood) if ![]() for all x
for all x ![]() U
and V (x) = 0 if and only
if x = p.
U
and V (x) = 0 if and only
if x = p.
Suppose
that V in ![]() . We want to examine
the derivative of V along trajectories of the
. We want to examine
the derivative of V along trajectories of the
system
![]() Suppose
that
Suppose
that ![]() is a solution of
is a solution of ![]() Then,
we have
Then,
we have
![]() (1.2)
(1.2)
where
![]() denotes the usual
dot product in
denotes the usual
dot product in![]() and
and
 ,
, 
is
the gradient vector of V. Since x is a solution of (1.1) we may
rewrite (1.2)
![]()
Thus,
if we define a function ![]() we have
we have ![]() .
.
It
is trivial, but important, to observe that we can compute ![]() without having to solve the
system
without having to solve the
system ![]() explicitly.
Where V(x) is Lyapunov’s functions
explicitly.
Where V(x) is Lyapunov’s functions
1.3.2 Stability in the sense of Lyapunov’s second method
Let ![]()
![]()
![]() (1.3) be dynamic system that satisfies all
the standard condition existence and uniqueness of solutions. A point
(1.3) be dynamic system that satisfies all
the standard condition existence and uniqueness of solutions. A point ![]() is equilibrium point of the
system, if
is equilibrium point of the
system, if ![]() .
.
Definition:
The equilibrium point x*
= 0 (assume x* is isolated critical point) of
equation (1.3) is
stable (in the sense of Lyapunov’s) at ![]() if
for any
if
for any ![]() there
exists
there
exists![]() such
that
such
that ![]() <
δ
<
δ ![]()
![]() . Lyapunov’s
stability is a very gentle requirement on equilibrium points. In particular, it
does not require that trajectories starting close to the origin tend to the
origin asymptotically. Also, stability is defined at a time instant
. Lyapunov’s
stability is a very gentle requirement on equilibrium points. In particular, it
does not require that trajectories starting close to the origin tend to the
origin asymptotically. Also, stability is defined at a time instant![]() . Uniform stability is a
concept which assures that the equilibrium point is not losing stability. We
state that for a uniformly stable equilibrium point
. Uniform stability is a
concept which assures that the equilibrium point is not losing stability. We
state that for a uniformly stable equilibrium point![]() ,
δ in the
definition of stability in the sense of Lyapunov’s not be a function of
,
δ in the
definition of stability in the sense of Lyapunov’s not be a function of ![]() , so that equation
, so that equation
![]() <
δ
<
δ ![]()
![]() (1.4)
(1.4)
may
hold for all![]() .
.
Asymptotic
stability is made precise in the following definition. In many physical
situations, the origin may not be asymptotic stable for all possible initial
conditions but only for initial conditions contained in region around the
origin, such a region is called the region of asymptotic stability or finite
region of attraction. If such region exists, computation of such a region is of
great interest to the system designer.
Definition:
An equilibrium point
x* =
0 of (1) is
asymptotically stable at ![]() if
if
x*
= 0 is stable,
and
x*
= 0 is locally attractive; i.e., there exists ![]() such
that
such
that
![]() <
δ
<
δ ![]()
![]() (1.5)
(1.5)
As
in the previous definition, asymptotic stability is defined at t0.
Uniform
asymptotic stability requires:
x*
= 0 is uniformly stable,
and
x*
= 0 is uniformly locally
attractive; i.e., there exists δ independent
of t0
for which equation (1.5) holds. Further, it is
required that the convergence in equation (1.5) is uniform. In other words, a
solution ![]() is called asymptotic stable if it
is stable and attractive. Finally, we say that an equilibrium point is unstable
if it is not stable.
is called asymptotic stable if it
is stable and attractive. Finally, we say that an equilibrium point is unstable
if it is not stable.
In another way, the region of asymptotic stability of the origin is defined
as the set of all points X0 that ![]() and
and
![]() .
.
So, we can find an open invariant set Ω with boundary ![]() such that Ω is the region of
asymptotic stability (RAS) of system (1.1) defined by the property that every
trajectory starting from
such that Ω is the region of
asymptotic stability (RAS) of system (1.1) defined by the property that every
trajectory starting from ![]() reaches the
equilibrium point of the corresponding system.
reaches the
equilibrium point of the corresponding system.

a) Stable in the sense of Lyapunov b) Asymptotically stable
Figure 1.1: Phase portraits for stable and asymptotically stable.
Definition: A set A of points in En is (positive) invariant with respect to the system (1.1), if every solution of (1.1) starting in A remains in A for all future of time.
1.3.3 Basic theorem of Lyapunov’s
To state Lyapunov’s second method of estimating region of asymptotic stability first define the two definitions concerned with the construction of certain scalar function. Let V(x) be scalar continuous function, i.e. real-valued function of the variables
Definition 1: The scalar function V(x) is said to be positive definite on the set
V(0) =0 and V(x)>0 for
Definition 2: The scalar function V(x) is negative definite on the set
Example: If n=3 the function
Definition: The derivative of V with respect to the system
Note that V*(x) can be computed directly from the differential equation without any knowledge of the solutions. Herein lies the power of Lyapunov’s method. We observe that if
In other words, along a solution
Example 2: For the system
We obtain, using the definition (1.6) with
With these definitions, we may state the basic theorem as follows.
Theorem 1: Let p be a fixed point of the system
Let U be an open neighborhood of p and let
a. If
b. If
Geometrically, the condition
A function satisfying the conditions in the theorem and (a) is called a Lyapunov’s function for f at p. If it satisfies (b), it is called a strict Lyapunov’s function.
Proof: Let
Since V is positive definite and continuous function, it is possible to, if x(t) solution
of
Example 1: Mass on spring.
Consider a point mass with mass m attached to a spring, with the mass constrained to move along a line. Let y denote the position of the mass, with y = 0 the equilibrium position. Moving the mass in the positive y direction stretches the spring and moving the mass in the negative y direction compresses the spring. According to Hooke's law, the force exerted by the spring is
F = -ky,
for some constant k > 0 (this is an approximation that is good for displacements that are not to large).
Applying Newton's law F = ma, we see that the differential equation governing the motion of the mass is
Appropriate initial conditions are the initial position and velocity of the mass. Of course, we can solve this equation explicitly to show that all of the motions are periodic and the equilibrium position (y = 0, velocity = 0) is stable. But, for illustration, let's prove that the equilibrium is stable using a Lyapunov function.
There is an obvious choice from physics, the total energy of the system.
The work done against the spring in moving from 0 to y is

This is the potential energy of the system at position y. The kinetic energy is
The total energy is
To apply Lyapunov's theorem, we need to convert the second order equation to a first order system. Using x1 = y, x2 =

Thus, the equation is

Looking at our expression for the energy, we take
This is clearly positive definite with respect to the origin. The gradient of V is

Thus, we have
This shows that the origin is stable.
Example 2: Consider the planar system
The origin is a fixed point. Take
Thus,
See figure below for a picture of the phase portrait of this system near the origin.

Figure 1.2: The origin is asymptotically stable for the system of (i) (texas.math.ttu.edu)
Definition: A continuous function V: Rn × R+ → R is decrescent if for some
Theorem 2: Let V (x, t) be a non-negative function with derivative
1. If V (x, t) is locally positive definite and
2. If V (x, t) is locally positive definite and decrescent, and
3. If V (x, t) is locally positive definite and decrescent, and
4. If V (x, t) is positive definite and decrescent, and
Since the theorem 2 only gives sufficient conditions, the search for a Lyapunov’s function establishing stability of an equilibrium point could be arduous. However, it is a remarkable fact that the converse of this theorem also exists. If an equilibrium point is stable, then there exists a function V (x, t) satisfying the conditions of the theorem. However, the utility of this and other converse theorems is limited by the lack of a computable technique for generating Lyapunov’s function.
We present a converse Lyapunov’s result for nonlinear time-varying systems that are uniformly semi globally asymptotically stable. This stability property pertains to the case when the size of initial conditions may be arbitrarily enlarged and the solutions of the system converge, in a stable way, to a closed ball that may be arbitrarily diminished by change a design parameter of the system (typically but not exclusively, a control gain). This result is notably useful in cascaded-based control when uniform practical asymptotic stability is established without a Lyapunov’s function. We provide a tangible example by solving the stabilization problem of a hovercraft.
Theorem: If there exists a scalar function V(x) that is positive definite and for which V*(x) is negative definite on some region Ω containing the origin, then the zero solution of (1.1) is asymptotically stable.
Proof: If there is a solution
We have a non-increasing function V(
We will show that (**) is impossible. By continuity, for the
.
Therefore, the solution
Let
Since 0 is not a point of S we have using also (1.7)
Integrating, we obtain V(
2. Lyapunov’s second method for estimating region of asymptotic stability of autonomous system
This chapter deals with the application of Lyapunov’s second method on the estimating region of asymptotic stability. It is a technique of estimating region of asymptotic stability solution of differential equation (nonlinear autonomous) of
2.1. Definition of region of asymptotic stability
Definition: The region of asymptotic stability of the origin is defined as the set of all points X0 that
So, we can find an open invariant set Ω with boundary
Before discussing the Lyapunov’s second method for estimating region of asymptotic stability of autonomous System, let us state one theorem which is very important for estimating region of asymptotic stability.
Theorem 2.1: Let V(x) be a nonnegative scalar function defined on some set Ω
Proof: Let
and so
Corollary 1: For the system
None of the results up to now, with the exception of theorem 2.1 has given any indication of the size region of asymptotic stability. Let
Consider the set

Figure 2.1
This shows that such a set
The region of asymptotic stability is at least as large as the largest invariant set contained in
In particular, the interior of
We shall now show these ideas by actual examples.
Example 1:
Consider the scalar equation
Let
 (**)
(**)
There are only two critical points (-1,0) and (0,0) by using the linear approximation. The first is unstable and the second is asymptotically stable. However, we know nothing about the region of stability. To estimate region of asymptotic stability we have to use corollary (1) and theorem 2.1. We note that (*) is a Lienard equation with g(u)=u+u2; we try that V function is
 implies
implies This function is positive definite on the set

Figure 2.2
We have
This is clearly y1 axis with

We see that the points (-1,0), (0,0) are the only invariant subsets of E, because at all other points of E,
those lie in
However, it is almost certainly a larger set than
Let us consider the region

Figure 2.3
If we can show that no solution can leave
Thus no solution starting in

Figure 2.4
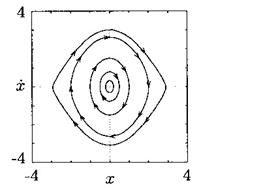
Example 2: Consider the Lienard equation
Where g(0)=0, ug(u)>0 (
0<|u|<a , where
 with f and g
continuously differentiable. It is easily shown by
with f and g
continuously differentiable. It is easily shown by
the method already employed (corollary 1, theorem 2.1 above) that the zero solution is asymptotic stable. Again, the problem is to determine the region of asymptotic stability. Here we employ a different equivalent system, namely
where

Equation (*) and (**) are equivalent. To show the equivalence, let
 and try the V function
and try the V function Ω=

Figure 2.5
If we take the region separately as
But, since for (
We see that the origin is the only invariant subset of E and thus the origin is (corollary1 and theorem 2.1) asymptotically stable. We now wish to consider the curves
Hence, directly from theorem 2.1 every solution starting in
2.2. Global asymptotic stability
We present a converse Lyapunov’s result for nonlinear time-varying systems that are uniformly semi globally asymptotically stable. This stability property pertains to the case when the size of initial conditions may be arbitrarily enlarged and the solutions of the system converge, in a stable way, to a closed ball that may be arbitrarily diminished by tuning a design parameter of the system (typically but not exclusively, a control gain). This result is especially useful in cascaded based control when uniform practical asymptotic stability is established without a Lyapunov’s. function, e.g. via averaging. We provide a concrete example by solving the stabilization problem of a hovercraft.
In many problems, in control theory or nuclear reactor dynamics, for examples, in which the zero solution of 2.1 is known to be asymptotically stable, it is important to determine whether all solutions, no matter what their initial values may be, approach the origin. In other words, we wish to determine whether the region of asymptotic stability is the whole space
If V is positive definite with respect to 2.1,
Therefore
Theorem 2.2: Let there exist a scalar function V(x) such that:
i. V(x) is positive definite on
ii. With respect to
iii. The origin is the only invariant subset of the set
Then the zero solution of
From above theorem we have the following consequence.
Corollary 2: Let be a scalar function V(x) that satisfies (i) above and that has
Corollary 3: If only (i) and (ii) of theorem 2.2 are satisfied, then all solutions of
Example 1:Consider the Lienard equation
where g(u) is continuously differential for all u and
as
we assert that the zero solution is globally asymptotically stable.
Solution:: The equivalent system is

If we choose the familiar V function
then we have already shown, using it and corollary 1, theorem 2.1 that the origin is asymptotic stable. Since hypothesis (i) of theorem 2.2 is clearly fulfilled because of the requirement
as Occasionally it happens that, there is difficulty to find a V function that satisfies all the three condition of theorem 2.2. In that case it can sometimes be useful to prove the bound of all solution first, and separately establish the proposition that all bounded solutions approach zero. To illustrate this, consider the Lienard equation again, but under different assumptions. We now remove the requirement that
 and
replace it by stronger requirement on the damping.
and
replace it by stronger requirement on the damping.
3. Estimating the region of asymptotic stability of nonautonomous system
In this chapter we deals with the extended of chapter two which discuss about autonomous system to non autonomous system. We consider the system
In which f depends explicitly on t. We will discuss with region of asymptotic stability by means of V function that may depends on t and y. In this we have to modify the definition as follows. Let V(t,y) be a scalar continuous function having continuous first order partial derivatives with respect to t and the component of y in a region
Definition 1: The scalar function V(t,y) is said to be positive definite on the set
V(t,0)=0 and there exists a scalar function W(y), independent of t, with
Definition 2: The scalar function V(t,y) is negative definite on
Example:
1. If n=2, let
2. If n=2, let
Definition: The derivatives of V(t,y) with respect to the system
If
Definition 3: A scalar function U(t, y) is said to satisfy an infinitesimal upper bound if and only if for every
Example: The function
Theorem 3.1: If there exists a scalar function V(t, y) that is positive definite satisfies an infinitesimal upper bound, and for which V*(t,y) is negative definite, then the zero solution of
Example 1: Consider the system
Where b is real constant and where
=
Clearly V is positive definite and satisfies an infinitesimal upper bound; moreover, V*(t, y1, y2) is negative definite. Thus it satisfies the theorem above.
Example 2: Consider the system
Where
 =0
(i=1, 2) (**)
=0
(i=1, 2) (**)
This condition implies that gi(t,0,0) =0 (i=1,2); thus yi=0 is critical point and we wish to establish its asymptotic stability.
To establish asymptotic stability consider the same V function as before. However, with respect to the system (*) we now obtain V*(t,y1,y2)
|y1 g1(t, y1,y2)+ y2 g2(t,y1,y2)|
Since |
Choose
V*(t,y1,y2)
Thus V* is negative definite on the set {{(t, y1, y2)| t
Consider the scalar equation
where
and the positive definite scalar function
Thus
For the problem such as the one consider on equation (i) above, it is natural to inquire whether the results and techniques discussed in chapter 2 for autonomous systems can be carried over to the nonautonomous cases. One difficulty in doing this is that the notion of invariant set, natural for autonomous systems, cannot be defined directly for non autonomous systems. However, for a class of problems that may be called asymptotically autonomous systems, analogous results do hold and we state one such theorem below.
Let f(t,y) and h(y) be continuous together with their first derivatives with respect to the components of y in a set {(t,y)|0
Definition: The system
is said to be asymptotically autonomous on the set Ω if
a)
b) For every
Example: Consider the scalar equation
This equation is asymptotically autonomous on any closed bounded se
Uniformly with respect to y in Ω

whenever
Theorem 2: Suppose the system (3.2) is asymptotically autonomous on some set Ω in y-space. Suppose
Then every bonded solution of
We will now establish the asymptotic stability (global) of the zero solution of the system
So that
is asymptotically autonomous and the corresponding limiting system is
which is obtained from (*) by putting y2=0. In order to apply theorem 2 above we must assume
for
We observe next that every solution of
exists on
Therefore,
Thus by a familiar argument
To apply theorem 2 we need to obtain M, the largest invariant subset of Ω with respect to the system (**) since every solution of (**) has the from
Summary
A region of asymptotic stability is a set of points surrounding a stable equilibrium point for which every system trajectory starting at a point in the set asymptotically takes to the equilibrium point. This seminar paper is to develop and validate computationally good methods of estimating regions of asymptotic stability of nonlinear systems and apply Lyapunov’s second method.
In general we can summarize the main points of this seminar paper as follows:
• Lyapunov’s second method used to determine stability of differential equation without explicitly integrating the nonlinear differential equation.
• It also determines asymptotic stability and estimate the region of asymptotic stability (RAS) of both autonomous and nonautonomous nonlinear systems.
• For this Lyapunov’s direct method is very useful method for estimating the region of asymptotic stability for non linear system.
References
1. Ali Saberi, 1983. Stability and control of nonlinear singularly perturbed system, with application to high –gain feedback. Ph.D dissertation Michigan State University. East Lansing. FIND ONLINE
2. Fred Brauer and John A.Nohel, 1869. The Qualitative Theory of Ordinary Differential Equations. University of Wisconsin, over publication, Inc., New York. FIND ONLINE
3. Garrett Birkhoff Gion Carlorot, Ordinary Differential Equations, 4th edition, John Wiley & Sons.FIND ONLINE
4. R. M. Murray, Z. Li and S. S. Sastri. Lyapunov stability theory. Caltech. FIND ONLINE
5. Mao, J. (1999) Differential Equation Stochastic. LaSalle theorems for SDEs, limits sets of SDEs.
6. Richard E.Williamson, 1997. Introduction to Differential Equations and Dynamical systems. the McGraw-Gill companies, Higher Education 20INB001, Dartmouth College. FIND ONLINE
7. G.P. Szegö, A contribution to Liapunov's second method: Nonlinear autonomous systems. Trans. ASME Ser. D.J.Basic Engrg., 84 (1962), 571-578.
Cite this paper
APA
Yadeta, Z. (2013). Lyapunov’s Second Method for Estimating Region of Asymptotic Stability. Open Science Repository Mathematics, Online(open-access), e70081944. doi:10.7392/Mathematics.70081944
MLA
Yadeta, Zelalem. “Lyapunov’s Second Method for Estimating Region of Asymptotic Stability.” Open Science Repository Mathematics Online.open-access (2013): e70081944.
Chicago
Yadeta, Zelalem. “Lyapunov’s Second Method for Estimating Region of Asymptotic Stability.” Open Science Repository Mathematics Online, no. open-access (March 20, 2013): e70081944. http://www.open-science-repository.com/lyapunovs-second-method-for-estimating-region-of-asymptotic-stability.html.
Harvard
Yadeta, Z., 2013. Lyapunov’s Second Method for Estimating Region of Asymptotic Stability. Open Science Repository Mathematics, Online(open-access), p.e70081944. Available at: http://www.open-science-repository.com/lyapunovs-second-method-for-estimating-region-of-asymptotic-stability.html.
Science
1. Z. Yadeta, Lyapunov’s Second Method for Estimating Region of Asymptotic Stability, Open Science Repository Mathematics Online, e70081944 (2013).
Nature
1. Yadeta, Z. Lyapunov’s Second Method for Estimating Region of Asymptotic Stability. Open Science Repository Mathematics Online, e70081944 (2013).
doi
Research registered in the DOI resolution system as: 10.7392/Mathematics.70081944.

This work is licensed under a Creative Commons Attribution 3.0 Unported License.